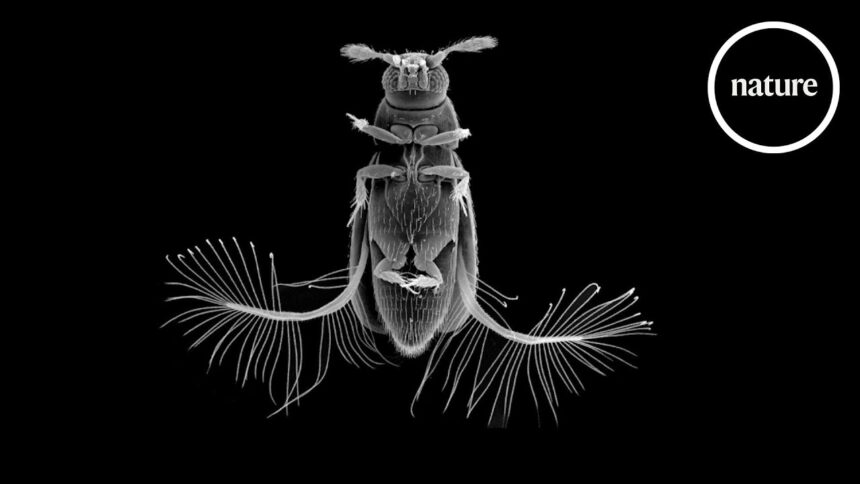
Une étude récemment publiée dans le Journal of Neurophysiology met en lumière les capacités remarquables des mouches (Calliphora vicina) à détecter des forces à travers des organes sensoriels spécialisés situés dans leurs pattes, malgré leur poids corporel négligeable.
Cette recherche ouvre la voie à une meilleure compréhension de la biomécanique des insectes, tout en suggérant des applications novatrices pour le développement de robots marchants de nouvelle génération.Les chercheurs de la Marshall University et de l’Université de Virginie-Occidentale se sont intéressés à la sensille campaniforme, ces organes sensoriels présents dans le tibia des pattes arrière des mouches, qui sont responsables de la détection des contraintes mécaniques.
Grâce à des expériences approfondies, ils ont pu démontrer que ces capteurs sont extrêmement sensibles aux variations de force, non seulement en termes d’intensité, mais également en ce qui concerne la vitesse de changement.
Ils ont observé que même de faibles variations transitoires de force entraînent une forte inhibition de l’activation de ces capteurs.
Sasha Zill, professeur à la Marshall University et principal auteur de l’étude, souligne que la détection de la force est essentielle pour le maintien de l’équilibre et de la locomotion, indiquant que ces insectes légers adoptent des mécanismes de détection beaucoup plus sophistiqués que ce que l’on pourrait penser.Les résultats de cette étude révèlent que les sensilla campaniforme des mouches sont capables de mesurer non seulement la résistance, mais aussi la vitesse d’application de force, montrant des réponses sensorielles avec un comportement d’hystérésis.
Pour soutenir ces observations, un modèle mathématique a été développé, basé sur les mécanismes observés chez des insectes de plus grande taille, confirmant ainsi l’hypothèse que la détection de force est une caractéristique universelle parmi diverses espèces.
Cette formation complexe est cruciale pour le contrôle musculaire et le maintien de l’équilibre, et pourrait également contribuer à la conception de robots marchant plus stables et adaptables.
Selon Zill, cette approche de modélisation pourrait non seulement enrichir notre compréhension des ajustements sensoriels chez les animaux, mais également conduire à des avancées significatives en locomotion robotique en imitant les systèmes biologiques existants.Les contributions de Sumaiya Chaudhry, Hibba Chaudhry, et Nicholas Szczecinski, Ph.D., ont également été essentielles à ce projet, témoignant ainsi de l’effort collaboratif entre ces institutions pour explorer des avenues de recherche prometteuses dans le domaine de la biomécanique et de la robotique.